用“飞来咒”控制你的直升机
- 风行水上 - 果壳网 guokr.com - 果壳网DIYer:puzzlebox
制作时间:一星期
制作难度:★★★★★
GEEK指数:★★★★★. 这个制作会向你展示如何拆开一架遥控直升机,然后修改它的远程控制硬件使之能够通过开源的电脑软件来控制. 更重要的是,它可以通过常见的消费级 脑电图 头戴式感应器感应到人脑的专注和放松状态,进而控制直升机的飞行.

| DIYer: | puzzlebox |
|---|---|
| 制作时间: | 一星期 |
| 制作难度: | ★★★★★ |
| GEEK指数: | ★★★★★ |
这个制作会向你展示如何拆开一架遥控直升机,然后修改它的远程控制硬件使之能够通过开源的电脑软件来控制。更重要的是,它可以通过常见的消费级 脑电图 头戴式感应器感应到人脑的专注和放松状态,进而控制直升机的飞行!
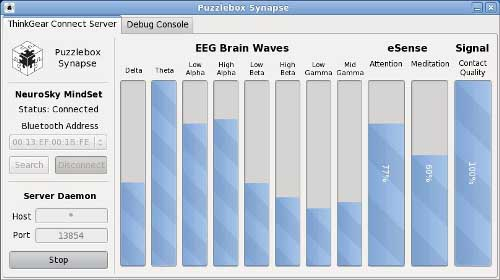
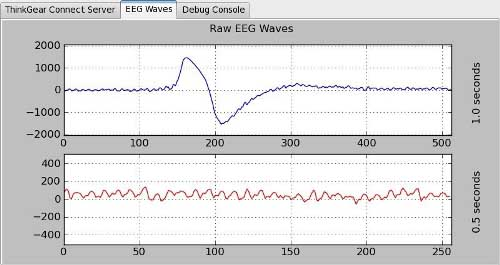
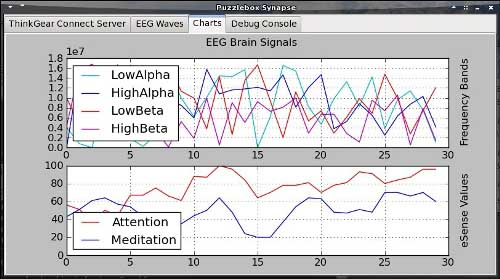
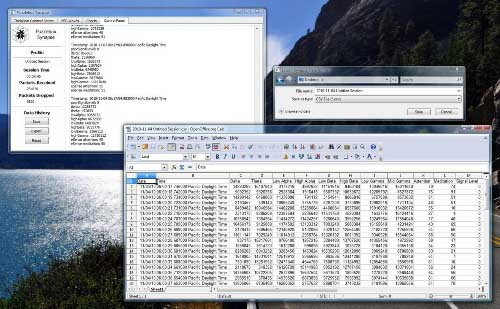
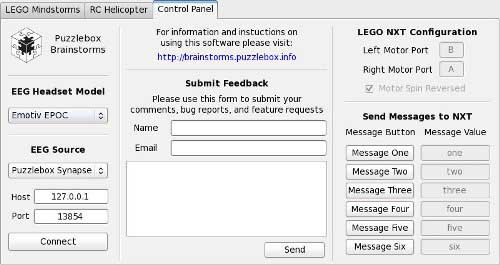
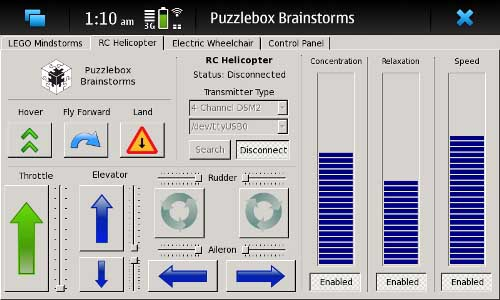
项目中用到的软件包含两个应用程序,Puzzlebox Synapse和 Puzzlebox Brainstorms 。前者连接到市售的消费级头戴式脑电图感应器,比如 NeuroSky MindSet 或者 Emotiv EPOC 。后者连接到从遥控器拆出的发射芯片上,依据Puzzlebox Synapse给出的信号向直升机发送飞行命令。这些软件(包括源代码)可以在 Brainstorms Puzzlebox 的网站下载。
双向电梯


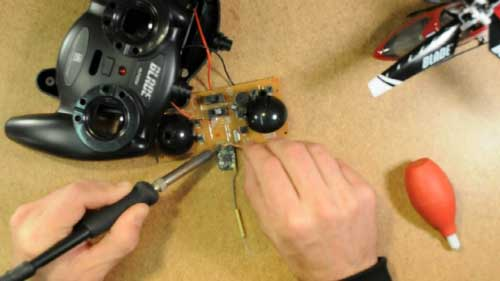
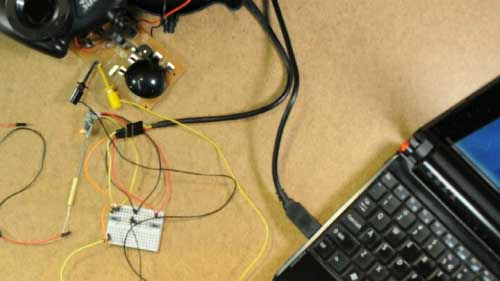
开始干活之前,拆解直升机。充电并安装好电池,确定所有部件都工作良好之后再开始检查或拆卸单个部件(译注:开拆前别忘了取下电池,不要带电拆卸)。你也应该事先熟悉直升机的基本控制,包括如何设置,基本控制和飞行特征。这里我们用的直升机是一架 Blade mCX2 。













最后,感谢以下给了这个项目很大帮助的人和机构:NoisebridgeHackerspace_
Miloh Alexander, Jake Walters, Tony Roberts, Paul Tonkin, Greg Smith, Chris Hellyar
| 编辑: | 小蜂 |
|---|
果壳DIY站QQ群:132647923(加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy