【转】获取用户移动方向,指南针原理
- - 研发管理 - ITeye博客其实获取方向本应该很简单的事情,在文章一中看到 有个TYPE_ORIENTATION 关键字,说明可以直接获取设备的移动方向,但是最新版的SDK加上了这么一句话“TYPE_ORIENTATION This constant is deprecated. ”也就是说,这种方式已经被取消,要开发者使用 SensorManager.getOrientation()来获取原来的数据.
其实获取方向本应该很简单的事情,在文章一中看到 有个TYPE_ORIENTATION 关键字,说明可以直接获取设备的移动方向,但是最新版的SDK加上了这么一句话“TYPE_ORIENTATION This constant is deprecated. use SensorManager.getOrientation() instead. ”也就是说,这种方式已经被取消,要开发者使用 SensorManager.getOrientation()来获取原来的数据。
实际上,android获取方向是通过磁场感应器和加速度感应器共同获得的,至于具体的算法SDK已经封装好了。也就是说现在获取用户方向有两种方式,一是官方推荐的,通过SensorManager.getOrientation()来获取,这个方法表面看似容易(那是因为你还没看到他的参数。。一会再说),但实际上需要用到两个感应器共同完成工作,特点是更加的准确。第二种方法非常简单,就像前一篇文章获取加速度一样,直接得到三个轴上的数据。
额,从难一些的介绍吧,因为毕竟第一种方法会是android未来的一个选择,第二种不知道什么时候就要成为历史了。
android给我们提供的方向数据是一个float型的数组,包含三个方向的值 如图
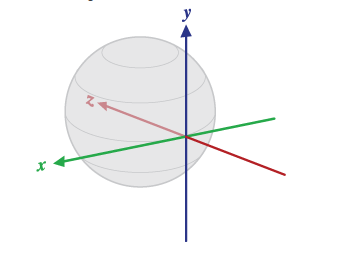
当你的手机水平放置时,被默认为静置状态,即XY角度均为0
values[0] 表示Z轴的角度:方向角,我们平时判断的东西南北就是看这个数据的,经过我的实验,发现了一个有意思的事情,也就是说使用第一种方式获得方向(磁场+加速度)得到的数据范围是(-180~180),也就是说,0表示正北,90表示正东,180/-180表示正南,-90表示正西。而第二种方式(直接通过方向感应器)数据范围是(0~360)360/0表示正北,90表示正东,180表示正南,270表示正西。
values[1] 表示X轴的角度:俯仰角 即由静止状态开始,前后翻转
values[2] 表示Y轴的角度:翻转角 即由静止状态开始,左右翻转
可见统一获取方向的方法是必须的,因为处理这些数据的算法可能针对第一种获取方式,那么当用在第二种方式时,移植性就不好了。
看下面的方法
--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Computes the device's orientation based on the rotation matrix.
When it returns, the array values is filled with the result:
The reference coordinate-system used is different from the world coordinate-system defined for the rotation matrix:
All three angles above are in radians and positive in the counter-clockwise direction.
通常我们并不需要获取这个函数的返回值,这个方法会根据参数R[]的数据填充values[]而后者就是我们想要的。
那么R表示什么呢?又将怎么获取呢?
R[] 是一个旋转矩阵,用来保存磁场和加速度的数据,大家可以理解未加工的方向数据吧
R通过下面的静态方法获取,这个方法也是用来填充R[]
第二个是是一个转换矩阵,将磁场数据转换进实际的重力坐标中 一般默认情况下可以设置为null
第三个是一个大小为3的数组,表示从加速度感应器获取来的数据 在onSensorChanged中
第四个是一个大小为3的数组,表示从磁场感应器获取来的数据 在onSensorChanged中
好了基本逻辑就是这样的,下面给大家演示一个简单的测试方向的例子,可以时刻监听用户的方向
只要把其中的两个Sensor。TYPE_ACCELEROMETER改成 Sensor.TYPE_ORIENTATIO就好了,但是今天分享的方法大家最好掌握,这应该是未来android的标准。
Sensor感应器应该就先暂时介绍到这里吧,该看一下进程线程的东西了,其实hardware包中还有个非常重要的类,Camera摄像头,相信大家也听过android扫描器,很强大。以后有时间和大家分享吧。
接下来的安排 应该是 线程 activity然后是geocode
话说我也没有个指导老师,一个人对着SDK研究这些,有些累阿~求高人指点。
转自: http://blog.csdn.net/octobershiner/article/details/6641942