MTCNN人脸及特征点检测--基于树莓派3B+及ncnn架构 - yuanlulu的博客 - CSDN博客
- -本文尝试在树莓派3B+上用ncnn框架测试MTCNN. ncnn的基本编译和使用请参考《. 在树莓派3B+上编译ncnn并用benchmark和mobilenet_yolo测试》. mtcn-ncnn项目中下载mtcnn子目录,把这个目录放在最新的ncnn源码目录下. 修改ncnn最顶层的CMakeList.txt,增加对mtcnn的支持.
本文尝试在树莓派3B+上用ncnn框架测试MTCNN。
ncnn的基本编译和使用请参考《 在树莓派3B+上编译ncnn并用benchmark和mobilenet_yolo测试》。本文在这个博客基础上进行操作。
从 mtcn-ncnn项目中下载mtcnn子目录,把这个目录放在最新的ncnn源码目录下
修改ncnn最顶层的CMakeList.txt,增加对mtcnn的支持
add_subdirectory(examples)add_subdirectory(benchmark)add_subdirectory(src)# 添加对mtcnn目录的支持add_subdirectory(mtcnn) 将mtcnn/mtcnn.cpp删除,将mtcnn_new.cpp重命名为mtcnn.cpp
修改mtcnn.cpp源码,把imgproc.hpp那行修改下:
// #include <opencv2/imgproc.hpp>
#include <opencv2/imgproc/imgproc.hpp> 修改ncnn-root-dir/mtcnn/CMakeList.txt, 去掉imgcodecs:
# find_package(OpenCV REQUIRED core highgui imgproc imgcodecs)
find_package(OpenCV REQUIRED core highgui imgproc) 如果不这么改,编译报错:opencv_imgcodecs is required but was not found
因为我本地的opencv库是2.4的,所以不需要imgcodecs这个选项。
$cd<ncnn-root-dir>$sudomkdir-p build
$cdbuild
$ cmake -DCMAKE_TOOLCHAIN_FILE=../toolchains/pi3.toolchain.cmake -DPI3=ON..$make-j4# 生成./src/libncnn.a 生成的二进制文件为ncnn-root-dir/build/mtcnn/mtcnn, 将它复制到ncnn-root-dir/mtcnn目录下。
mtcn-ncnn这个项目意见转换好了mtcnn的ncnn模型放在在ncnn-root-dir/mtcnn,所以这里就直接调用了,我没有单独做模型转换。
$ cd <ncnn-root-dir>/mtcnn
# ./mtcnn 1.jpg 测试结果存入result.jpg,取下来看就可以了。
测试过程发现,第一次测试的时间会长一些,第二次及以后的时间会缩短。
我在上篇文章 在树莓派3B+上编译ncnn并用benchmark和mobilenet_yolo测试介绍过默认开启openmp加速的方案。本次编译mtcnn也是这么操作的。也就是说我的测试同时使用了neon和openmp加速。
简单汇总(时间是估的,没精确算):
| 分辨率 | 1920x1080(8个人脸) | 648x610(2个人脸) | 324x305(2个人脸) |
|---|---|---|---|
| 平均耗时(ms) | 80 | 14 | 3.3 |
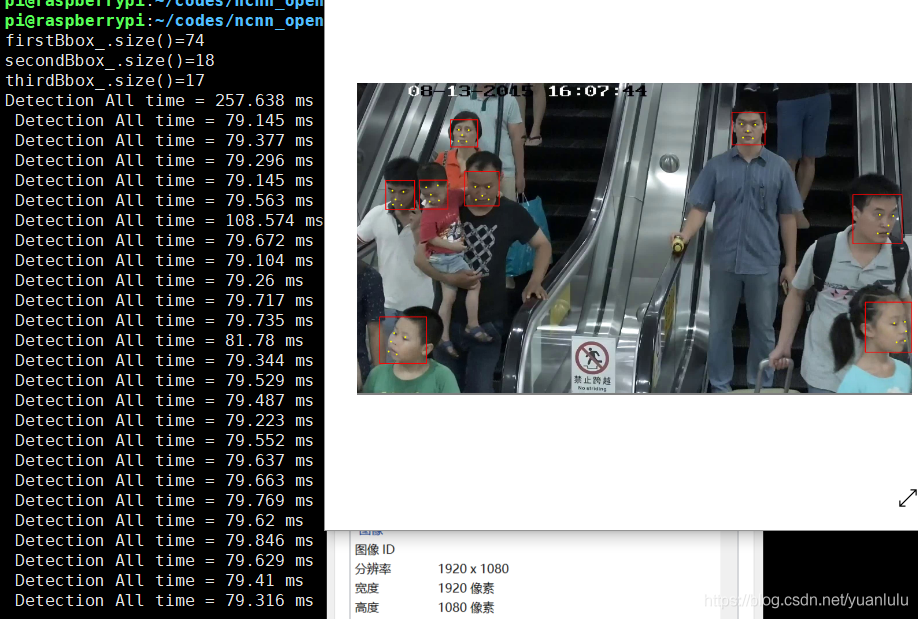
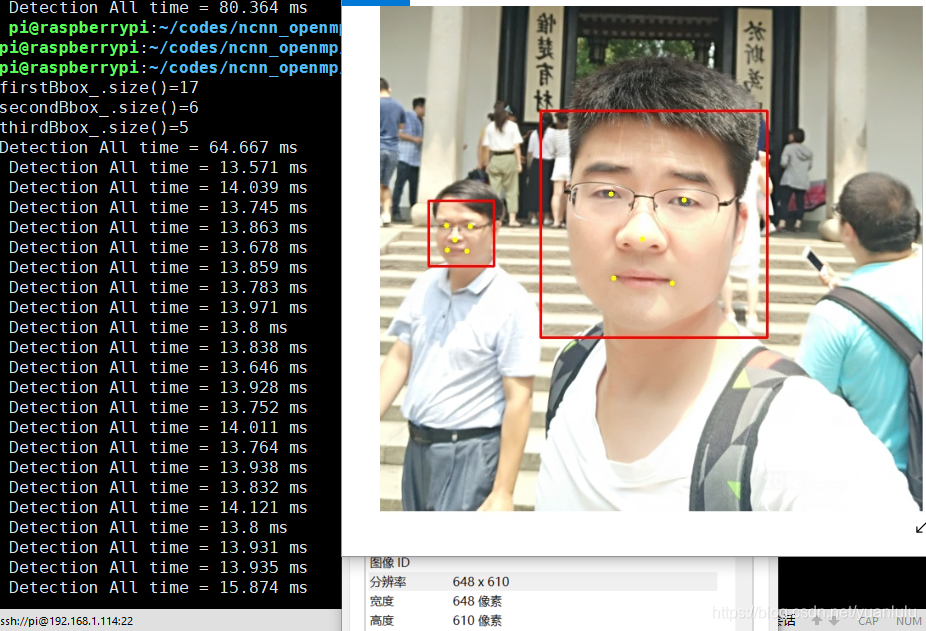

从上面可以知道,最终编译出的二进制文件是由原始项目里的mtcnn_new.cpp修改的,但是原始文件只测试一次,我需要做多次测试求平均,所以我对这个文件进行了简单修改,每次测试100次,目视就可以估算平均了。
#include <stdio.h>
#include <algorithm>
#include <vector>
#include <math.h>
#include <iostream>
#include <sys/time.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "net.h"
using namespace std;
using namespace cv;
struct Bbox
{
float score;
int x1;
int y1;
int x2;
int y2;
float area;
bool exist;
float ppoint[10];
float regreCoord[4];
};
struct orderScore
{
float score;
int oriOrder;
};
bool cmpScore(orderScore lsh, orderScore rsh){
if(lsh.score<rsh.score)
return true;
else
return false;
}
static float getElapse(struct timeval *tv1,struct timeval *tv2)
{
float t = 0.0f;
if (tv1->tv_sec == tv2->tv_sec)
t = (tv2->tv_usec - tv1->tv_usec)/1000.0f;
else
t = ((tv2->tv_sec - tv1->tv_sec) * 1000 * 1000 + tv2->tv_usec - tv1->tv_usec)/1000.0f;
return t;
}
class mtcnn{
public:
mtcnn();
void detect(ncnn::Mat& img_, std::vector<Bbox>& finalBbox);
private:
void generateBbox(ncnn::Mat score, ncnn::Mat location, vector<Bbox>& boundingBox_, vector<orderScore>& bboxScore_, float scale);
void nms(vector<Bbox> &boundingBox_, std::vector<orderScore> &bboxScore_, const float overlap_threshold, string modelname="Union");
void refineAndSquareBbox(vector<Bbox> &vecBbox, const int &height, const int &width);
ncnn::Net Pnet, Rnet, Onet;
ncnn::Mat img;
const float nms_threshold[3] = {0.5, 0.7, 0.7};
const float threshold[3] = {0.6, 0.6, 0.6};
const float mean_vals[3] = {127.5, 127.5, 127.5};
const float norm_vals[3] = {0.0078125, 0.0078125, 0.0078125};
std::vector<Bbox> firstBbox_, secondBbox_,thirdBbox_;
std::vector<orderScore> firstOrderScore_, secondBboxScore_, thirdBboxScore_;
int img_w, img_h;
};
mtcnn::mtcnn(){
Pnet.load_param("det1.param");
Pnet.load_model("det1.bin");
Rnet.load_param("det2.param");
Rnet.load_model("det2.bin");
Onet.load_param("det3.param");
Onet.load_model("det3.bin");
}
void mtcnn::generateBbox(ncnn::Mat score, ncnn::Mat location, std::vector<Bbox>& boundingBox_, std::vector<orderScore>& bboxScore_, float scale){
int stride = 2;
int cellsize = 12;
int count = 0;
//score p
float *p = score.channel(1);
float *plocal = location.channel(0);
Bbox bbox;
orderScore order;
for(int row=0;row<score.h;row++){
for(int col=0;col<score.w;col++){
if(*p>threshold[0]){
bbox.score = *p;
order.score = *p;
order.oriOrder = count;
bbox.x1 = round((stride*col+1)/scale);
bbox.y1 = round((stride*row+1)/scale);
bbox.x2 = round((stride*col+1+cellsize)/scale);
bbox.y2 = round((stride*row+1+cellsize)/scale);
bbox.exist = true;
bbox.area = (bbox.x2 - bbox.x1)*(bbox.y2 - bbox.y1);
for(int channel=0;channel<4;channel++)
bbox.regreCoord[channel]=location.channel(channel)[0];
boundingBox_.push_back(bbox);
bboxScore_.push_back(order);
count++;
}
p++;
plocal++;
}
}
}
void mtcnn::nms(std::vector<Bbox> &boundingBox_, std::vector<orderScore> &bboxScore_, const float overlap_threshold, string modelname){
if(boundingBox_.empty()){
return;
}
std::vector<int> heros;
//sort the score
sort(bboxScore_.begin(), bboxScore_.end(), cmpScore);
int order = 0;
float IOU = 0;
float maxX = 0;
float maxY = 0;
float minX = 0;
float minY = 0;
while(bboxScore_.size()>0){
order = bboxScore_.back().oriOrder;
bboxScore_.pop_back();
if(order<0)continue;
if(boundingBox_.at(order).exist == false) continue;
heros.push_back(order);
boundingBox_.at(order).exist = false;//delete it
for(int num=0;num<boundingBox_.size();num++){
if(boundingBox_.at(num).exist){
//the iou
maxX = (boundingBox_.at(num).x1>boundingBox_.at(order).x1)?boundingBox_.at(num).x1:boundingBox_.at(order).x1;
maxY = (boundingBox_.at(num).y1>boundingBox_.at(order).y1)?boundingBox_.at(num).y1:boundingBox_.at(order).y1;
minX = (boundingBox_.at(num).x2<boundingBox_.at(order).x2)?boundingBox_.at(num).x2:boundingBox_.at(order).x2;
minY = (boundingBox_.at(num).y2<boundingBox_.at(order).y2)?boundingBox_.at(num).y2:boundingBox_.at(order).y2;
//maxX1 and maxY1 reuse
maxX = ((minX-maxX+1)>0)?(minX-maxX+1):0;
maxY = ((minY-maxY+1)>0)?(minY-maxY+1):0;
//IOU reuse for the area of two bbox
IOU = maxX * maxY;
if(!modelname.compare("Union"))
IOU = IOU/(boundingBox_.at(num).area + boundingBox_.at(order).area - IOU);
else if(!modelname.compare("Min")){
IOU = IOU/((boundingBox_.at(num).area<boundingBox_.at(order).area)?boundingBox_.at(num).area:boundingBox_.at(order).area);
}
if(IOU>overlap_threshold){
boundingBox_.at(num).exist=false;
for(vector<orderScore>::iterator it=bboxScore_.begin(); it!=bboxScore_.end();it++){
if((*it).oriOrder == num) {
(*it).oriOrder = -1;
break;
}
}
}
}
}
}
for(int i=0;i<heros.size();i++)
boundingBox_.at(heros.at(i)).exist = true;
}
void mtcnn::refineAndSquareBbox(vector<Bbox> &vecBbox, const int &height, const int &width){
if(vecBbox.empty()){
cout<<"Bbox is empty!!"<<endl;
return;
}
float bbw=0, bbh=0, maxSide=0;
float h = 0, w = 0;
float x1=0, y1=0, x2=0, y2=0;
for(vector<Bbox>::iterator it=vecBbox.begin(); it!=vecBbox.end();it++){
if((*it).exist){
bbw = (*it).x2 - (*it).x1 + 1;
bbh = (*it).y2 - (*it).y1 + 1;
x1 = (*it).x1 + (*it).regreCoord[0]*bbw;
y1 = (*it).y1 + (*it).regreCoord[1]*bbh;
x2 = (*it).x2 + (*it).regreCoord[2]*bbw;
y2 = (*it).y2 + (*it).regreCoord[3]*bbh;
w = x2 - x1 + 1;
h = y2 - y1 + 1;
maxSide = (h>w)?h:w;
x1 = x1 + w*0.5 - maxSide*0.5;
y1 = y1 + h*0.5 - maxSide*0.5;
(*it).x2 = round(x1 + maxSide - 1);
(*it).y2 = round(y1 + maxSide - 1);
(*it).x1 = round(x1);
(*it).y1 = round(y1);
//boundary check
if((*it).x1<0)(*it).x1=0;
if((*it).y1<0)(*it).y1=0;
if((*it).x2>width)(*it).x2 = width - 1;
if((*it).y2>height)(*it).y2 = height - 1;
it->area = (it->x2 - it->x1)*(it->y2 - it->y1);
}
}
}
void mtcnn::detect(ncnn::Mat& img_, std::vector<Bbox>& finalBbox_){
firstBbox_.clear();
firstOrderScore_.clear();
secondBbox_.clear();
secondBboxScore_.clear();
thirdBbox_.clear();
thirdBboxScore_.clear();
img = img_;
img_w = img.w;
img_h = img.h;
img.substract_mean_normalize(mean_vals, norm_vals);
float minl = img_w<img_h?img_w:img_h;
int MIN_DET_SIZE = 12;
int minsize = 90;
float m = (float)MIN_DET_SIZE/minsize;
minl *= m;
float factor = 0.709;
int factor_count = 0;
vector<float> scales_;
while(minl>MIN_DET_SIZE){
if(factor_count>0)m = m*factor;
scales_.push_back(m);
minl *= factor;
factor_count++;
}
orderScore order;
int count = 0;
for (size_t i = 0; i < scales_.size(); i++) {
int hs = (int)ceil(img_h*scales_[i]);
int ws = (int)ceil(img_w*scales_[i]);
//ncnn::Mat in = ncnn::Mat::from_pixels_resize(image_data, ncnn::Mat::PIXEL_RGB2BGR, img_w, img_h, ws, hs);
ncnn::Mat in;
resize_bilinear(img_, in, ws, hs);
//in.substract_mean_normalize(mean_vals, norm_vals);
ncnn::Extractor ex = Pnet.create_extractor();
ex.set_light_mode(true);
//ex.set_num_threads(4);
ex.input("data", in);
ncnn::Mat score_, location_;
ex.extract("prob1", score_);
ex.extract("conv4-2", location_);
std::vector<Bbox> boundingBox_;
std::vector<orderScore> bboxScore_;
generateBbox(score_, location_, boundingBox_, bboxScore_, scales_[i]);
nms(boundingBox_, bboxScore_, nms_threshold[0]);
for(vector<Bbox>::iterator it=boundingBox_.begin(); it!=boundingBox_.end();it++){
if((*it).exist){
firstBbox_.push_back(*it);
order.score = (*it).score;
order.oriOrder = count;
firstOrderScore_.push_back(order);
count++;
}
}
bboxScore_.clear();
boundingBox_.clear();
}
//the first stage's nms
if(count<1)return;
nms(firstBbox_, firstOrderScore_, nms_threshold[0]);
refineAndSquareBbox(firstBbox_, img_h, img_w);
printf("firstBbox_.size()=%d\n", firstBbox_.size());
//second stage
count = 0;
for(vector<Bbox>::iterator it=firstBbox_.begin(); it!=firstBbox_.end();it++){
if((*it).exist){
ncnn::Mat tempIm;
copy_cut_border(img, tempIm, (*it).y1, img_h-(*it).y2, (*it).x1, img_w-(*it).x2);
ncnn::Mat in;
resize_bilinear(tempIm, in, 24, 24);
ncnn::Extractor ex = Rnet.create_extractor();
ex.set_light_mode(true);
//ex.set_num_threads(4);
ex.input("data", in);
ncnn::Mat score, bbox;
ex.extract("prob1", score);
ex.extract("conv5-2", bbox);
if((score[1])>threshold[1]){
for(int channel=0;channel<4;channel++)
it->regreCoord[channel]=bbox[channel];
it->area = (it->x2 - it->x1)*(it->y2 - it->y1);
it->score = score[1];
secondBbox_.push_back(*it);
order.score = it->score;
order.oriOrder = count++;
secondBboxScore_.push_back(order);
}
else{
(*it).exist=false;
}
}
}
printf("secondBbox_.size()=%d\n", secondBbox_.size());
if(count<1)return;
nms(secondBbox_, secondBboxScore_, nms_threshold[1]);
refineAndSquareBbox(secondBbox_, img_h, img_w);
//third stage
count = 0;
for(vector<Bbox>::iterator it=secondBbox_.begin(); it!=secondBbox_.end();it++){
if((*it).exist){
ncnn::Mat tempIm;
copy_cut_border(img, tempIm, (*it).y1, img_h-(*it).y2, (*it).x1, img_w-(*it).x2);
ncnn::Mat in;
resize_bilinear(tempIm, in, 48, 48);
ncnn::Extractor ex = Onet.create_extractor();
ex.set_light_mode(true);
//ex.set_num_threads(4);
ex.input("data", in);
ncnn::Mat score, bbox, keyPoint;
ex.extract("prob1", score);
ex.extract("conv6-2", bbox);
ex.extract("conv6-3", keyPoint);
if(score[1]>threshold[2]){
for(int channel=0;channel<4;channel++)
it->regreCoord[channel]=bbox[channel];
it->area = (it->x2 - it->x1)*(it->y2 - it->y1);
it->score = score[1];
for(int num=0;num<5;num++){
(it->ppoint)[num] = it->x1 + (it->x2 - it->x1)*keyPoint[num];
(it->ppoint)[num+5] = it->y1 + (it->y2 - it->y1)*keyPoint[num+5];
}
thirdBbox_.push_back(*it);
order.score = it->score;
order.oriOrder = count++;
thirdBboxScore_.push_back(order);
}
else
(*it).exist=false;
}
}
printf("thirdBbox_.size()=%d\n", thirdBbox_.size());
if(count<1)return;
refineAndSquareBbox(thirdBbox_, img_h, img_w);
nms(thirdBbox_, thirdBboxScore_, nms_threshold[2], "Min");
finalBbox_ = thirdBbox_;
}
int main(int argc, char** argv)
{
const char* imagepath = argv[1];
cv::Mat cv_img = cv::imread(imagepath, CV_LOAD_IMAGE_COLOR);
if (cv_img.empty())
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
std::vector<Bbox> finalBbox;
mtcnn mm;
ncnn::Mat ncnn_img = ncnn::Mat::from_pixels(cv_img.data, ncnn::Mat::PIXEL_BGR2RGB, cv_img.cols, cv_img.rows);
struct timeval tv1,tv2;
struct timezone tz1,tz2;
# 测试100次
for (int cnt=0; cnt<100; cnt++) {
gettimeofday(&tv1,&tz1);
mm.detect(ncnn_img, finalBbox);
gettimeofday(&tv2,&tz2);
printf( "%s = %g ms \n ", "Detection All time", getElapse(&tv1, &tv2) );
}
for(vector<Bbox>::iterator it=finalBbox.begin(); it!=finalBbox.end();it++){
if((*it).exist){
rectangle(cv_img, Point((*it).x1, (*it).y1), Point((*it).x2, (*it).y2), Scalar(0,0,255), 2,8,0);
for(int num=0;num<5;num++)circle(cv_img,Point((int)*(it->ppoint+num), (int)*(it->ppoint+num+5)),3,Scalar(0,255,255), -1);
}
}
imwrite("result.jpg",cv_img);
return 0;
} 在树莓派3B+上编译ncnn并用benchmark和mobilenet_yolo测试